

碼垛機器人
詳細說(shuō)明

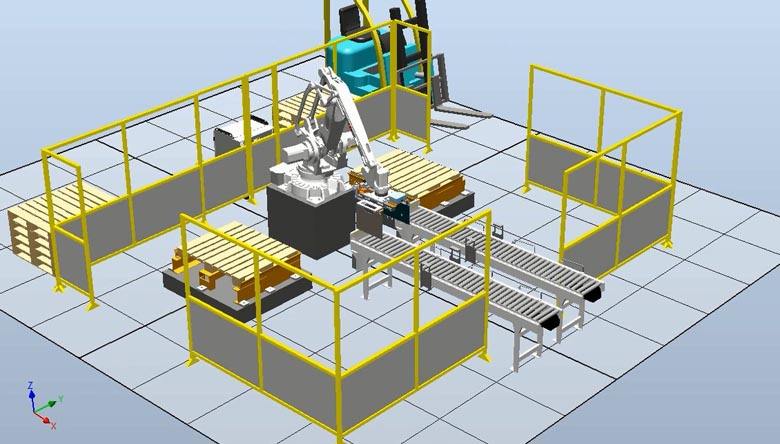
MD-25T 堆碼機器人
功 率: 三相,5KW,380V,50HZ/60Hz氣 壓: 3~6公斤/每平方厘米速 度: 25箱/分鍾
對(duì)于随機貨盤來說(shuō),碼垛機器人是唯一的選擇。盡管如此,機器人裝載也面(miàn)臨比較多的問題,如果要以較高的速度進(jìn)行生産,將(jiāng)更加困難重重。
一個處理随機裝載的機器人碼垛機需要特殊的軟件,通過(guò)軟件,機器人碼垛機與生産線的其他部分相連接,這(zhè)是個巨大的進(jìn)步。
一個用來建造随機貨盤的機器人能(néng)集成(chéng)進(jìn)工廠的倉庫管理系統(WMS)。理想上,它會(huì)成(chéng)爲WMS的前段,與倉庫軟件一起(qǐ)協調工作,來生産混合貨盤。
精密的軟件同樣能(néng)夠滿足對(duì)立即可上架貨盤的需求。一般來說(shuō),這(zhè)就(jiù)意味著(zhe)産品碼垛好(hǎo)後(hòu),部分或者全部一次包裝容器的标簽都(dōu)必須是朝外的。 機器人碼垛設備還(hái)是另外一個苛刻應用的選擇:冷凍倉庫内碼垛。在消費商品包裝領域,在一個冷凍倉庫内處理箱子是最困難的工作之一。工人們不得不頻繁地交替工作來保持身體暖和,這(zhè)就(jiù)間接的降低了工作效率并提高了勞動力成(chéng)本。
在冰凍環境下,自動化的随機存取式碼垛機并不是正确選擇,因爲大多數自動化随機存取碼垛機都(dōu)使用在冷庫裡(lǐ)會(huì)結冰的壓縮空氣管。而與自動化碼垛機相比,碼垛機器人的尺寸更緊湊,由于冷凍倉庫中的空間十分寶貴,因此這(zhè)點顯得尤爲重要。盡管如此,機器人在冷凍倉庫中的應用也存在著(zhe)一些問題。一些供應商開(kāi)始爲冷凍倉庫設計特殊的碼垛機器人。
在采用碼垛機器人的時(shí)候,還(hái)要考慮一個重要的事(shì)情,就(jiù)是機器人怎樣抓住一個産品。 真空抓手是最常見的機械臂臂端工具(EOAT)。相對(duì)來說(shuō),它們價格便宜,易于操作,而且能(néng)夠有效裝載大部分負載物。但是在一些特定的應用中,真空抓手也會(huì)遇到問題,例如表面(miàn)多孔的基質,内容物爲液體的軟包裝,或者表面(miàn)不平整的包裝等等。
其他的EOAT選擇包括翻蓋式抓手,它能(néng)將(jiāng)一個袋子或者其他包裝形式的兩(liǎng)邊夾住;叉子式抓手,它插入包裝的底部來將(jiāng)包裝提升起(qǐ)來;還(hái)有袋子式抓手,這(zhè)是翻蓋式和叉子式抓手的混合體,它的叉子部分能(néng)包裹住包裝的底部和兩(liǎng)邊。
將(jiāng)基本EOAT類型進(jìn)行其他的組合也是可以的。一個飲料包裝商在對(duì)裝滿瓶子,并且收縮裹包好(hǎo)的瓦楞托盤進(jìn)行碼垛時(shí)碰到了困難,真空吸盤會(huì)把托盤上的薄膜扯下來。
下一條: 搬運式助力機械手








 關閉返回
關閉返回